Trolley Scan(Pty) Ltd
Trolley Scan(Pty) Ltd
RFID-radar(tm)
RFID-radar is one of the most advanced RFID systems available in the world!!
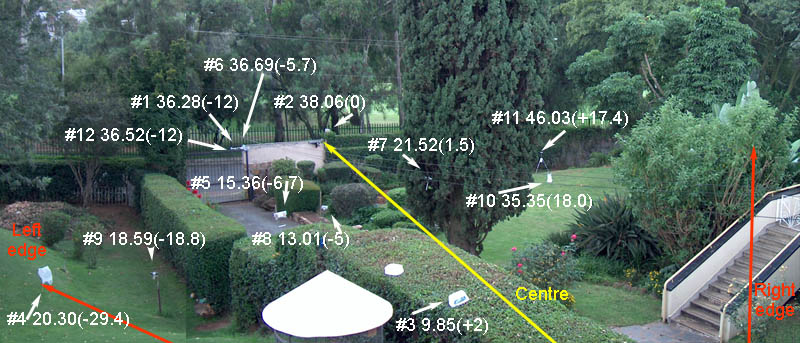
Besides identifying RFID transponders in its zone, the RFID-radar system is able to measure the range and direction of those transponders from the reader antennas.
For those wanting to experiment with this new technology, Trolley Scan have provided a starter system comprising a reader, 3 Yagi antennas and 20 transponders. The system operates at UHF frequencies in the bands allocated for RFID, using electric coupled propogation properties to transfer energy from the reader to the transponder and from the transponder back to the reader.
The RFID-radar measures the path length for signals travelling from the transponder to the reader to determine range.
By comparing signals arriving at two identical receivers with closely spaced antennas, the reader is able to determine the angle of arrival of the signals from the transponder and hence the direction of that transponder from the reader.

The small system, slightly bigger than a mobile broadband dongle, is capable of delivering higher power for longer range
operation for those countries where this is allowed, enabling the system
to also be used as a research tool. The purpose of this equipment is to
allow users to experiment and build systems using UHF RFID, allowing them
to understand the intracacies of using RF to power transponders at a distance.
The radar DOES NOT
The radar has three modes of operation, namely
When powering up the radar for the first time, when linked to the display program on a Win32 based computer for example.The system measures range by calculating the distance a signal from the transponder has travelled to the reader. To get a correct measurement, the reader has to know about delays through the antennas, the time to travel through the cables and the amplifiers.Any change in cable length is going to cause an error which needs to be corrected. A calibration procedure involving training the system using a single transponder at a known location is applied.
This procedure only needs to be done if there are any changes to the RF cables and equipment in the radar.
The calibration settings will be saved on the FLASH disc and are valid for all further measurements until there is a change in cabling or antennas.
Data format of data from the radar to the dispaly At one second intervals the radar relays the identity and position of each transponder in its zone.
22:45:08 BCBBB0005 21.78 -19.2 - 22:45:08 BCBBB5002 23.53 -0.5 - 22:45:08 BCBBB0026 24.09 31.6 - 22:45:09 BCBBB0004 39.43 -15.5 - 22:45:09 BCBBB0002 11.73 -3.1 - 22:45:09 BBBBB0000 47.88 8.8 - 22:45:09 BCBBB0027 27.01 -22.1 - 22:45:09 BCBBB0026 24.10 32.4 - 22:45:09 BCBBB0002 11.73 -3.0 - 22:45:09 BCBBB0004 39.43 -16.0 - 22:45:09 BCBBB5002 23.53 -2.1 - 22:45:09 BCBBB0005 21.78 -21.5 - 22:45:10 BCBBB0027 27.03 -23.0 - 22:45:10 BBBBB0000 47.88 9.2 - 22:45:11 BCBBB0026 24.10 31.3 - 22:45:11 BCBBB5002 23.53 -0.9 - 22:45:11 BCBBB0005 21.78 -21.0 - 22:45:11 BCBBB0004 39.42 -16.1 - 22:45:11 BCBBB0002 11.74 0.1 - 22:45:12 BBBBB0000 47.88 8.4 - 22:45:12 BCBBB0027 27.03 -23.4 - 22:45:13 BCBBB0004 39.43 -16.1 - 22:45:13 BCBBB0002 11.73 -3.2 - 22:45:13 BCBBB0005 21.78 -21.2 - 22:45:13 BCBBB5002 23.53 -0.7 - 22:45:13 BCBBB0026 24.10 31.8 - 22:45:14 BBBBB0000 47.88 10.2 - 22:45:14 BCBBB0027 27.03 -22.6 - 22:45:14 BCBBB0004 39.42 -16.1 PThe "P" in the last column indicates that the radar has temporarily lost signal from the transponder and is predicting current location.
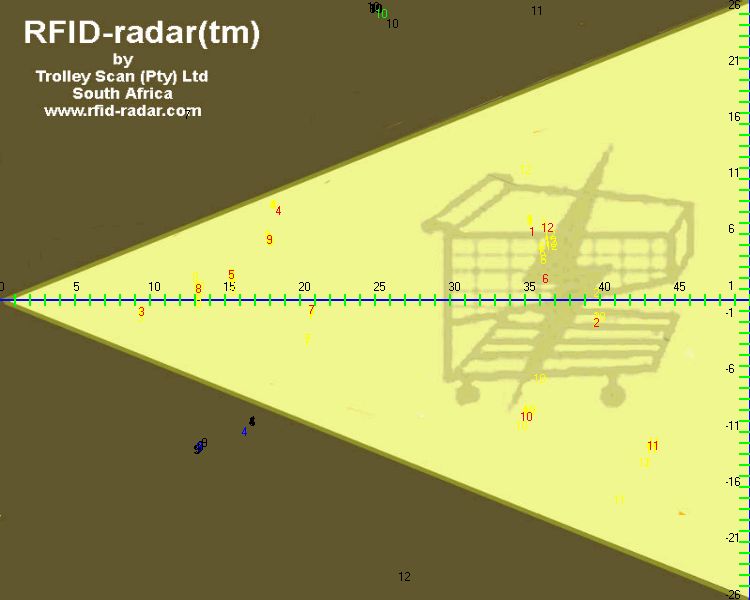
The reader is able to resolve angles based on the spacing of the receive antennas of approximately minus 32 degrees to plus 32 degrees. If the transponder is beyond those angles, it will be reported with the opposite sign and incorrect angle.The software shows alternate positions (mirror images) if the transponder is near the edge of the vision zone.
(In the above image the yellow zone indicates the field of view - Transponder 3 is just on the edge and its
tru location and image are shown (on the other edge at the same distance). Plots in the Brown area for 1 and 7 are image locations
of the plots in the yellow zone.)